Processing¶
The cameras transmit every captured image to the data acquisition systems which are standard desktop computers running Linux. Based on simple brightness changes, the computers save only moving images and discard all other data (this was not implemented for MOSAiC yet). The raw data of the VISSS consists of the video files (mov or mkv video files with h264 compression), the first recorded frame as an image (jpg format) for quick evaluation of camera blocking, and a csv file with the timestamps of the camera (capture_time) as well as the computer (record_time) and other meta information for each frame. The cameras run continuously and new files are created every 10 minutes (5 minutes for MOSAiC). In addition, a daily status csv file is maintained that contains information about software start and stop times and when new files were created. Both cameras record completely separately which requires an accurate synchronization of the camera and computer clocks for matching the observations of a single particle.
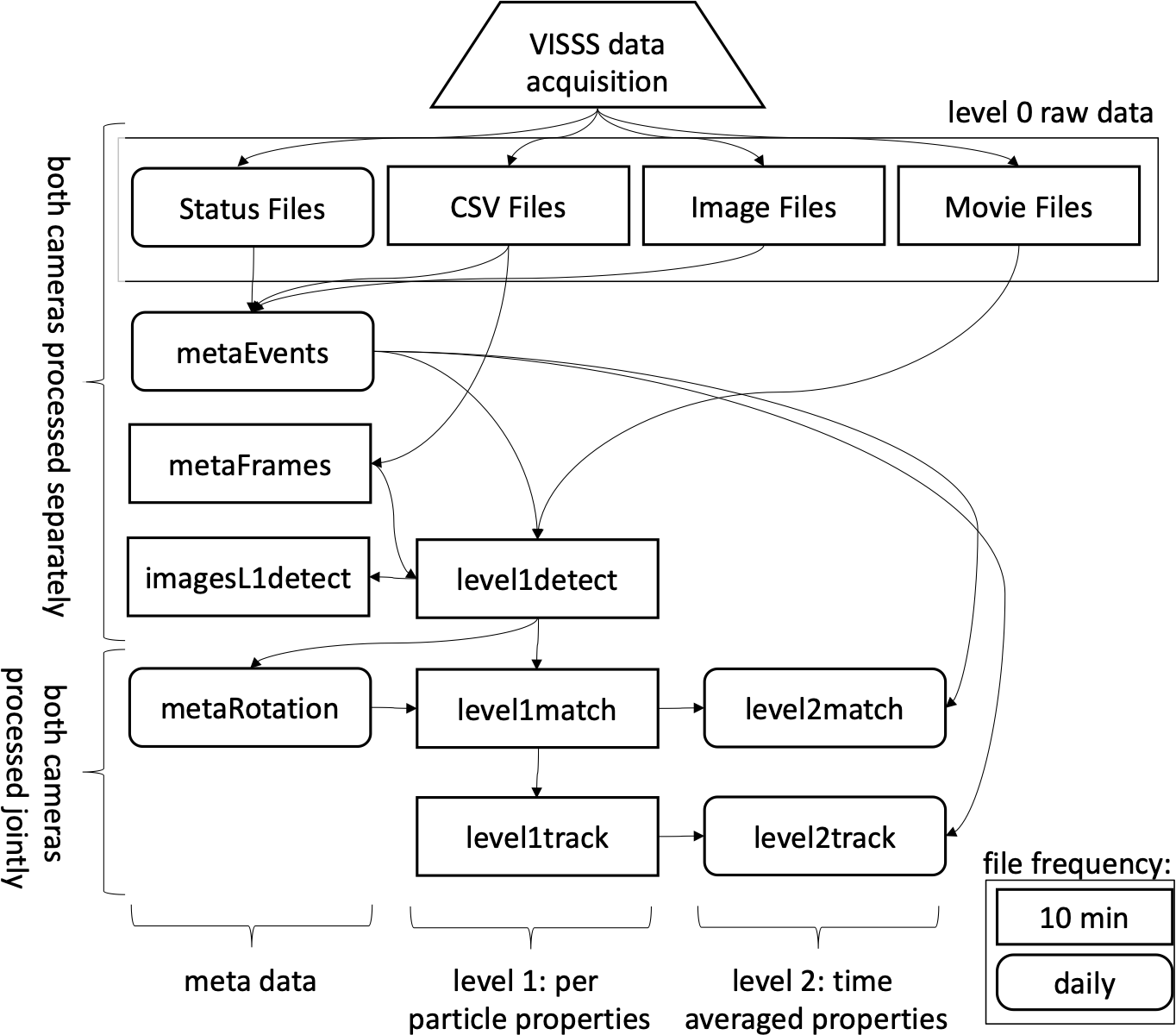
Flowchart of VISSS data processing. Daily products have rounded corners, 10-minute resolution products have square corners.¶
Obtaining particle properties from the individual VISSS video images requires (1) detecting the particles, (2) matching the observations of the two cameras, and (3) tracking the particles over multiple frames to estimate the fall velocities. The Level 1 products contain per-particle properties in pixel units using (1) a single camera, (2) matched particles from both cameras, and (3) exploiting particles tracked in time. For the Level 2 products, the Level 1 observations are calibrated (i.e., converted from pixel in metric units) and distributions of particle size, aspect ratio, and other properties are estimated based on the per-particle properties. In addition to the Level 1 and Level 2 products, there are metadata products: metaEvents is a netcdf version of the status files along with a camera blocking estimate based on the jpg images. metaFrames is a netcdf version of the csv file. metaRotation keeps track of the camera misalignment as detailed below. The imagesL1detect product contains images of the detected particles which is required for creating quicklooks like Fig. 1.c.
In the following, the processing of the Level 1 and Level 2 products is described in detail (Fig. 2). [*]
Description of the products
VISSSlib.scripts API¶
Various products at different levels need to be processed, typically by running a covenience function to VISSSlib.scripts. See the scripts folder
for sample shell scripts.